Department of Mechanical and Automation Engineering
The Chinese University of Hong Kong
Professor Yam is the principal investigator of Centre for Perceptual and Interactive Intelligence (CPII) since 2020. Before returning to teach at CUHK, he was a member of the Technical Staff in the Control Analysis Research Group at the Jet Propulsion Laboratory, Pasadena, CA, USA.
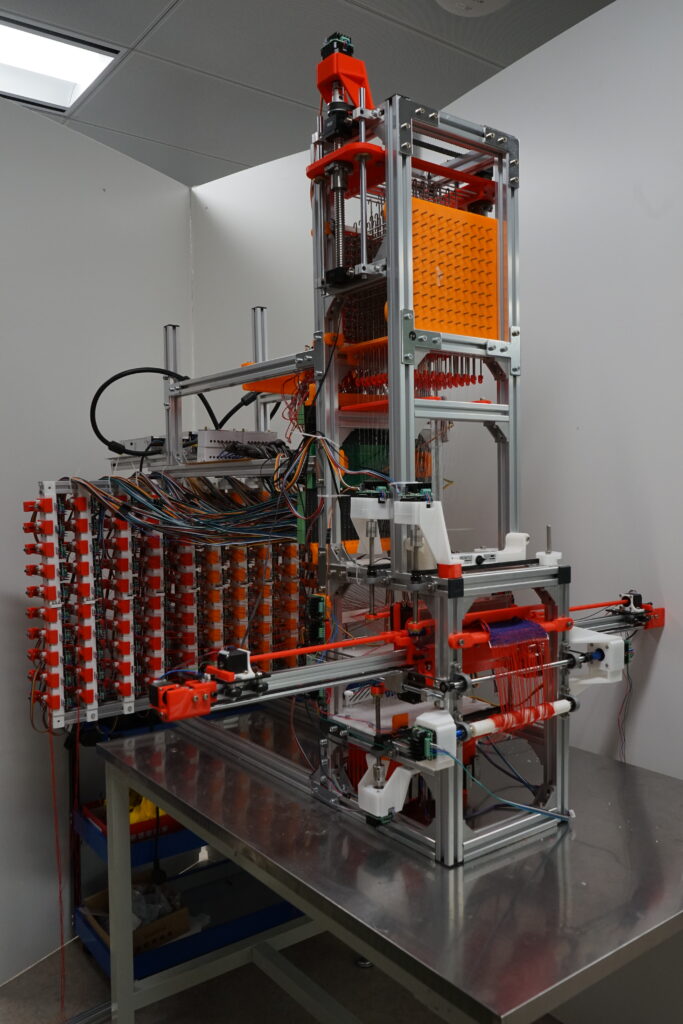
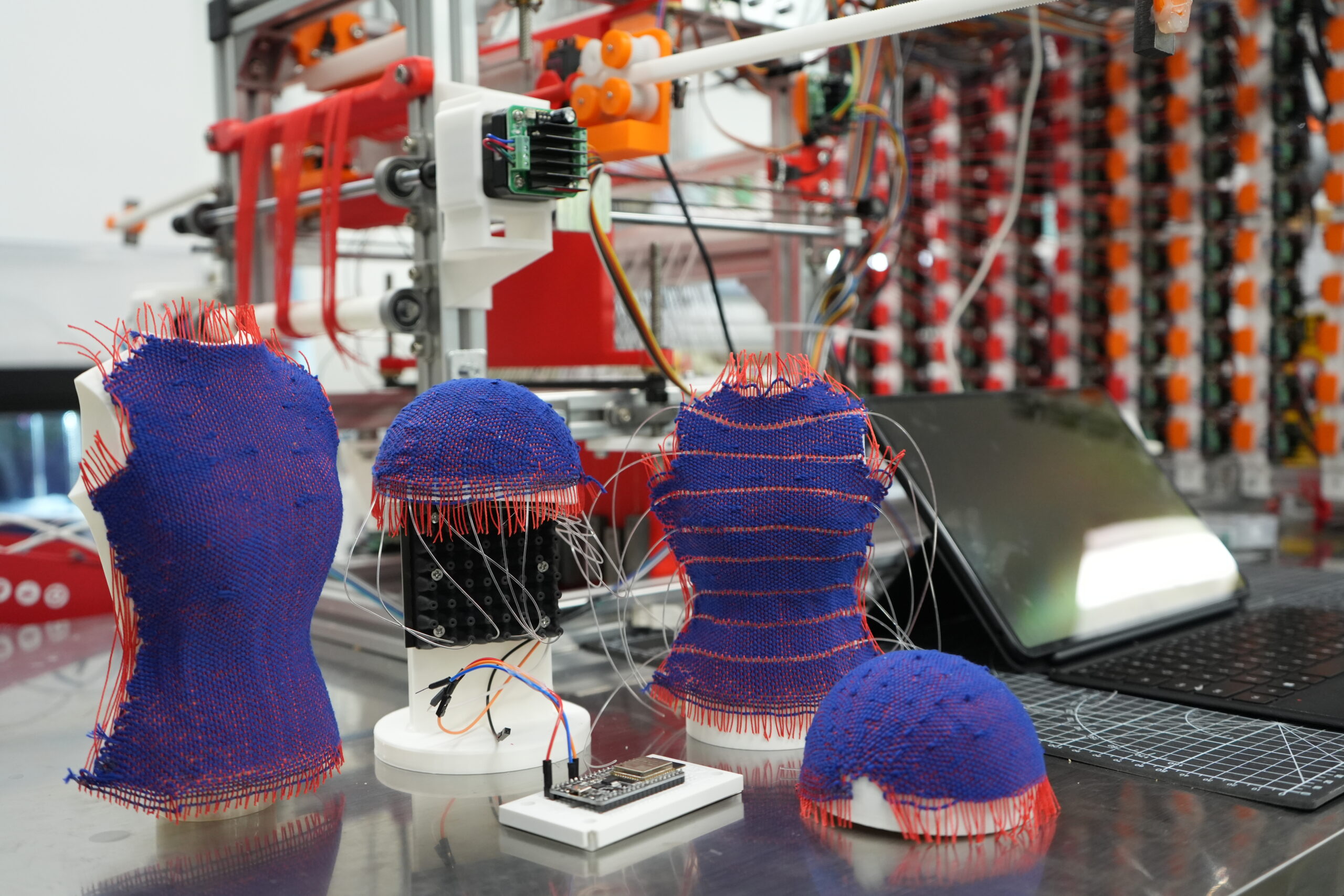
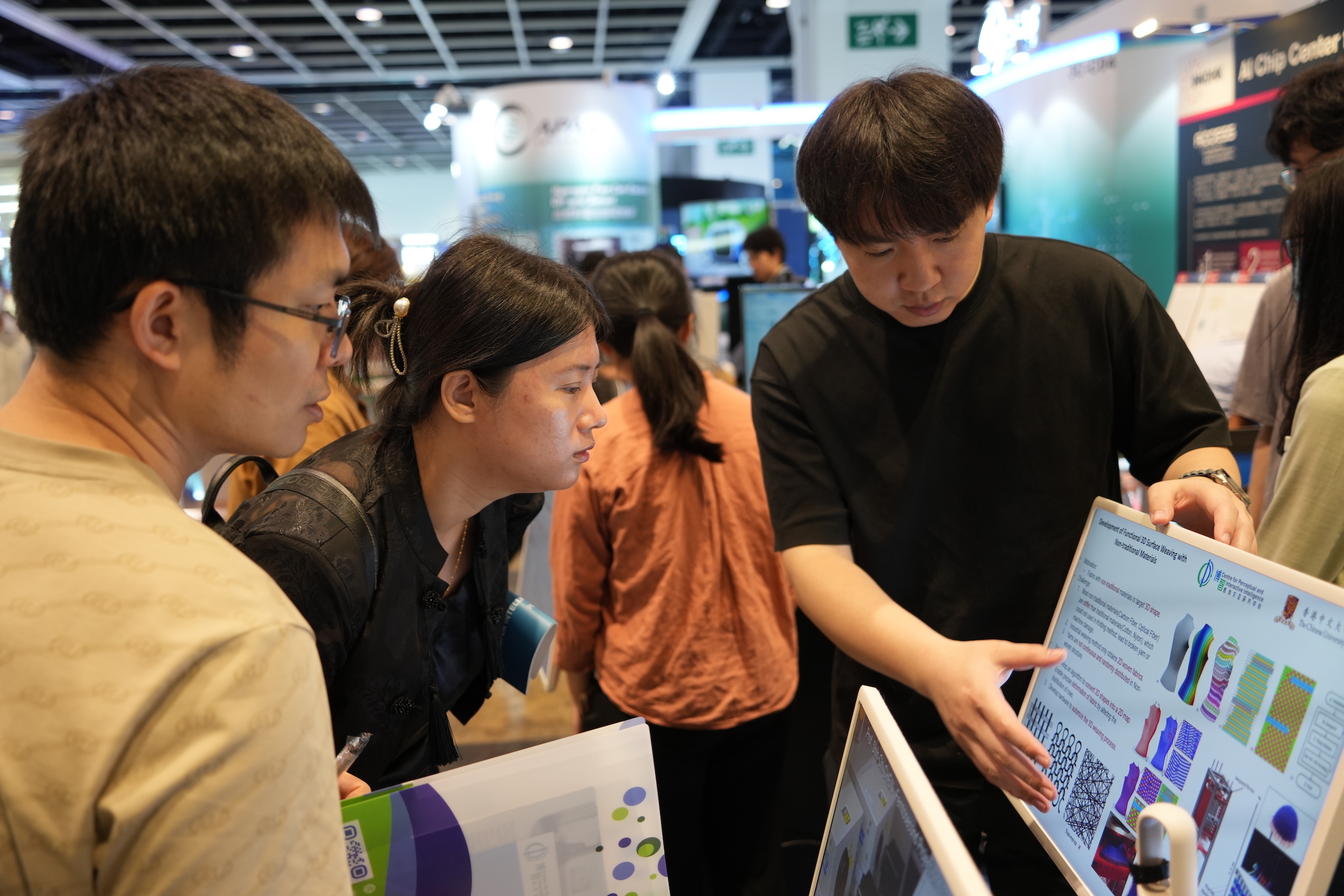
This technology focuses on the research of 3D human modelling, parametric design, prototyping and non-traditional materials fabrication. It has the capability to utilize weaving-based solutions as a means to overcome the limitations of traditional multi-modal robotic sensors, such as poor signal localization accuracy and high costs.
3D Human Body Scanner
By using a Full-Scale 3D Human Body Scanner that allows full body digitization of human subject with 0.2mm precision to support the formulation and analysis of a wide range of 3D human modelling schemes, we can apply our knitting instructions map or weaving map to produce personalized wearable fabrication with designated functions and/or advance mechanical properties.
With the ability to capture detailed body measurements and contours, the technology can be used to create custom-fit clothing that is tailored to the individual’s unique shape and size for produce a wide variety of clothing types.
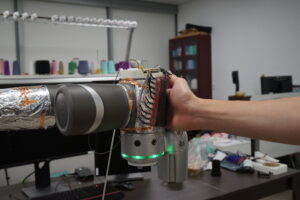
We introduce a fabric-based sensor utilizing a new weaving technique, which significantly improves its capability to conform to complex shapes. Furthermore, a unique woven layout of conductive threads enables multi-modal sensing with tactile and proximity detection. This sensor along with AI-enhanced motion planning algorithm has been successfully tested in applications such as collision avoidance and compliance control, representing a notable advancement in the field of robotic skin research.